Biomechanika ma wiele definicji. Przede wszystkim zapamiętaj, że biomechanika to nauka interdyscyplinarna, łącząca wiele nauk w sobie.
Bio – dotyczy organizmów żywych.
Mechanika – dotyczy sił fizycznych, przyczyn, skutków tychże sił.
Razem biomechanika to nauka, która bada właściwości tkanek żywego organizmu, sił oddziałujących na te tkanki, sił, które tkanki generują.
Dosłownie: fizyka w biologii.
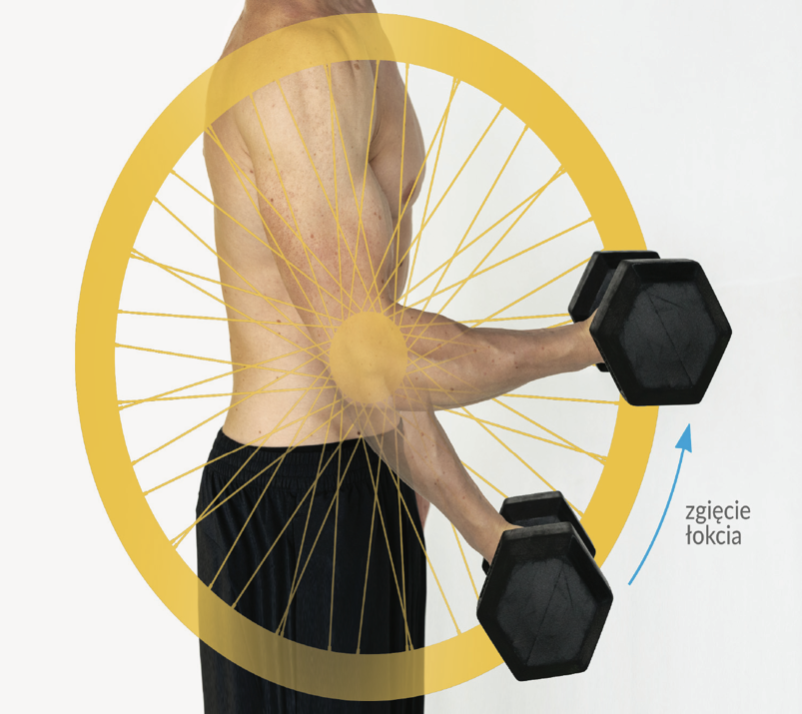
Klasyczny podział to podział biomechaniki na: ogólną, inżynierską, sportu, medyczną i rehabilitacyjną. Jeżeli widziałeś/widziałaś skróty myślowe, że biomechanika to rozrysowana siła, kiedy robimy uginanie na biceps to tak – jest to skrót myślowy, bo im głębiej tym więcej szczegółów i samej biomechaniki w biomechanice.
Wspomniałem, że bio odnosi się do organizmów żywych. Dokładnie tak: oznacza to, że nie tylko biomechanika ma swoje zastosowanie w świecie ludzi, ale wiele badaczy analizuje zastosowanie biomechaniki w świecie koni wyścigowych, psów, czy kotów. „Kot spada zawsze na 4 łapy” to powiedzenie, ale jednocześnie biomechanicy analizują dlaczego kot spada właśnie na 4 łapy i jak to robi.
Podstawowe pojęcia w biomechanice
Płaszczyzny
Płaszczyzna stanowi płaską powierzchnię w dwuwymiarze. Inaczej: to zbiór wspólnych punktów dla prostych leżących na płaszczyźnie.
Wyróżniamy 3 główne płaszczyzny:
- strzałkowa (przednia-tylna), przebiega od przodu do tyłu i od góry do dołu, dzieląc ciało na stronę prawą i lewą
- czołowa, przebiega od jednego boku do drugiego i od góry do dołu, dzieląc ciało na przód i tył
- horyzontalna (poprzeczna), przebiega od boku do boku i od przodu do tyłu, dzieląc ciało na górę i dół
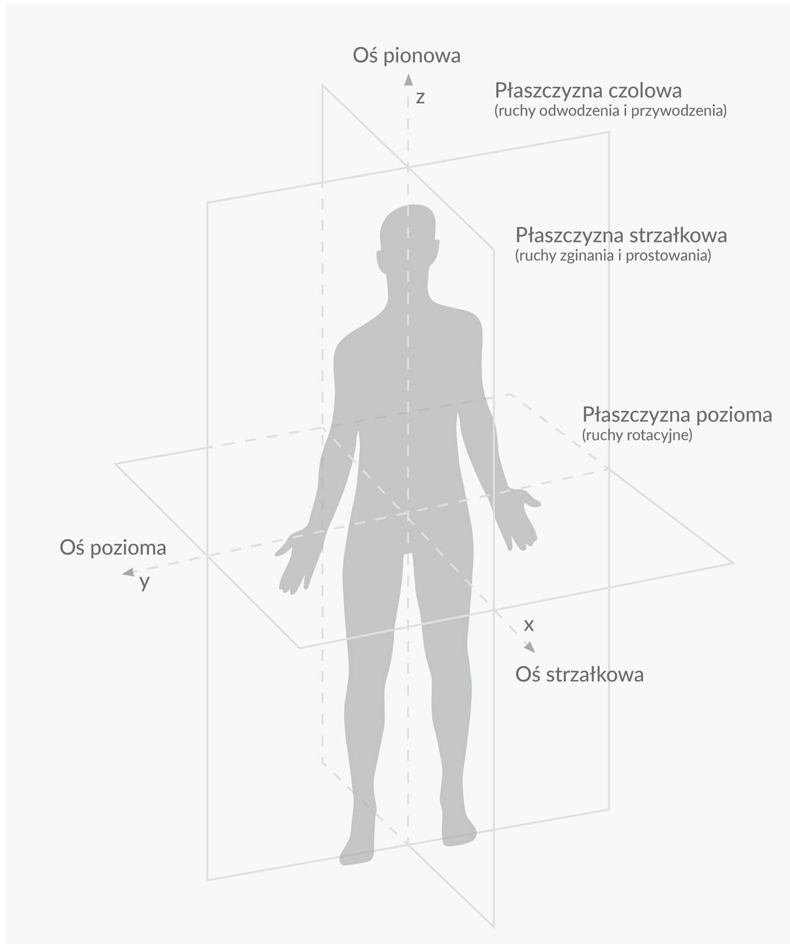
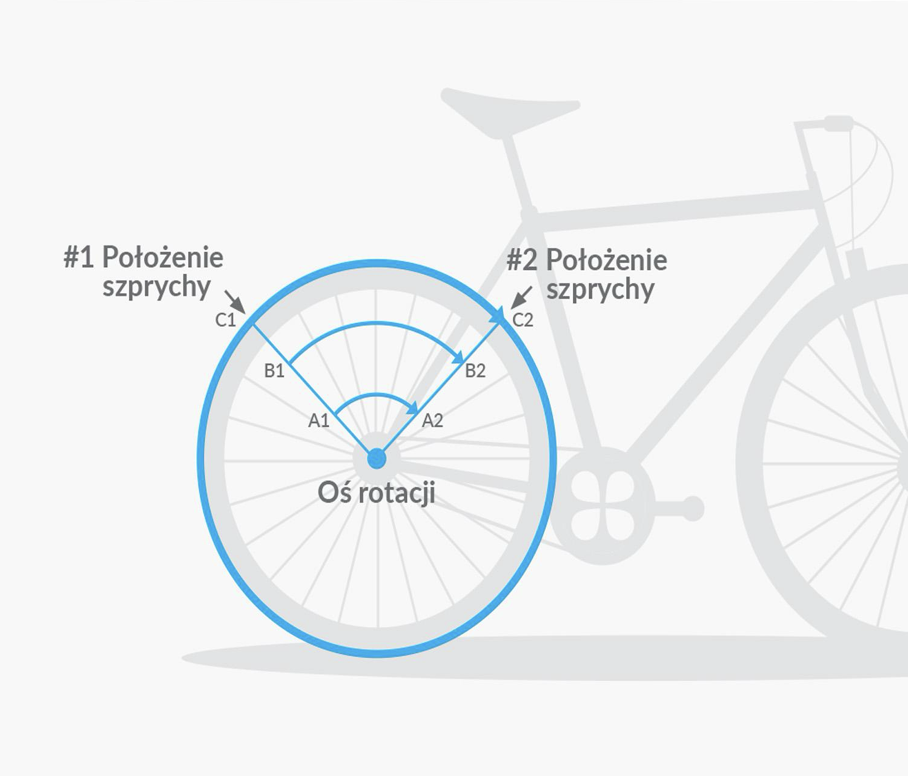
Osie
Osie anatomiczne są niezbędne do opisania ruchu, podobnie jak wcześniej wspomniane płaszczyzny. Razem stanowią bardzo zgrany zespół.
Osie odpowiadają wcześniej opisanym płaszczyznom anatomicznym:
- oś strzałkowa przebiega od przodu do tyłu i prostopadle do płaszczyzny czołowej0
- oś poprzeczna przebiega od lewej do prawej i prostopadle do płaszczyzny strzałkowej – oś pionowa przebiega od góry do dołu i prostopadle do płaszczyzny poprzecznej
Jak dopasować oś do płaszczyzny i odwrotnie? Zawsze prostopadle względem siebie.
| PŁASZCZYZNA | OŚ |
| STRZAŁKOWA | CZOŁOWA |
| CZOŁOWA | STRZAŁKOWA |
| POPRZECZNA (HORYZONTALNA) | PIONOWA |
Jeśli robimy zgięcia i wyprosty – robimy po płaszczyźnie strzałkowej wokół osi czołowej.
Jeśli robimy odwodzenia i przywodzenia – robimy po płaszczyźnie czołowej wokół osi strzałkowej.
Jeśli robimy rotacje zewnętrzne i wewnętrzne – robimy po płaszczyźnie horyzontalnej wokół osi pionowej.
Oczywiście ruchy dotyczą pozycji anatomicznej. Kiedy mamy zmianę pozycji człowieka (leżenie/siedzenie etc) zmienia się orientacja tego ruchu.
Siła
Siła to… no właśnie. Zasadniczo niełatwo jest zdefiniować siłę. Naukowo: „wektorowa wielkość fizyczna, która opisuje oddziaływanie między ciałami.” Z praktycznego punktu widzenia, pojęcie siły możemy opisać tym, co ona może rzeczywiście zrobić (co my możemy dzięki niej zrobić). Siła: porusza, zatrzymuje, zmienia kierunek, przyspiesza, zniekształca, a także odkształca.
Siłę traktujmy jak interakcję (ciągnięcie, bądź pchnięcie) pomiędzy dwoma obiektami, co może skutkować pozytywnym lub negatywnym wektorem przyspieszenia obiektu. Na przykład: pchnięcie w kierunku podłoża (jak np w martwym ciągu) generowane przez mocne wyprostowywanie kolana oraz biodra, może być wystarczające, aby przyspieszyć ciało (w górę) tak, aby opuściło ziemię – lub podniosło ciężar w przypadku martwego ciągu.
Siła wywierana przez jednostkę motoryczną jest uzależniona od liczby włókien unerwionych przez jednostkę motoryczną i szybkość, z którą jednostka motoryczna wyładowuje impuls lub potencjał czynnościowy

Różne aplikowana siła może być różna w skutkach na danej tkance.
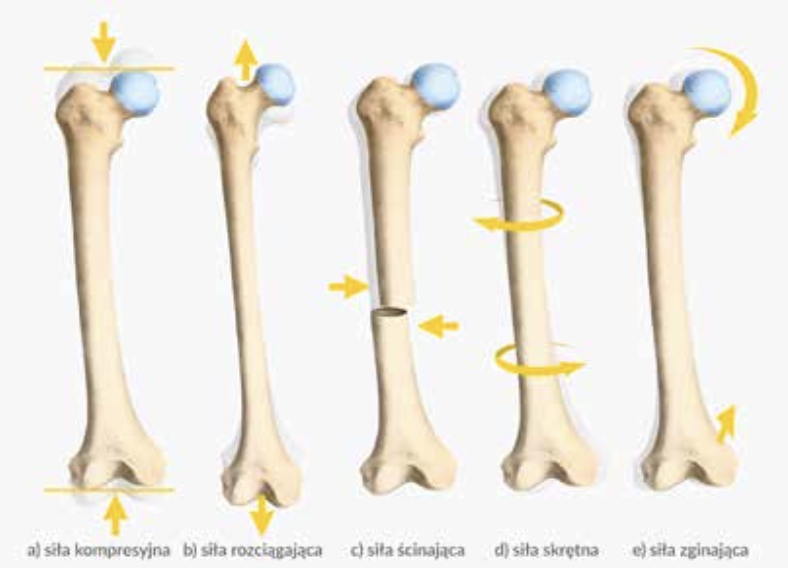
W przypadku modelu kości najczęściej rozróżniane siły to:
kompresyjne, rozciągające, ścinające, skrętne i zginające.
My trenując na siłowni chcemy wywierać siłę na danym obiekcie (hantli/sztandze/wyciągu/kettlebellu/drążku) i osiągać zamierzony efekt. Jeśli nasza siła będzie wystarczająca, żeby pokonać dany opór – skrócimy mięśnie pracujące koncentrycznie. Jeśli ta siła będzie niewystarczająca – nie skrócimy ich, ale zapracujemy izometryczne (iso-hold w wersji „yielding”).
Siła
Czym jest? Zależy od sytuacji.
W ogródku będzie to ziemia + ciężar szpadla + naszych kończyn górnych. Unosząc dziecko na rękach będzie to ciężar dziecka + naszych kończyn górnych. Na siłowni będzie to ciężar hantli, sztangi, gumy oporowej, czy kettlebella. Opór staje się oporem, gdy chcemy go pokonać. A tak naprawdę naszym oporem jest grawitacja.
Ramię w kontekście biomechaniki i analizy. To najkrótsza odległość od osi (najczęściej stawu) wokół której odbywa się ruch do przyłożonej siły. Wyróżniamy ramię oporu i ramię siły mięśniowej. Ramię oporu to ramię siły, którą musimy pokonać (ciężar naszego ciała + obciążenia zewnętrznego. Ramię siły mięśniowej to ramię siły, którą generujemy, aby pokonać opór (mięśniem “pracującym”).

Dźwignia
Z definicji zaczerpniętej z mechaniki była to maszyna prosta, gdzie za pomocą mniejszej siły mogliśmy uzyskać działanie większej siły. Ze względu na strony przyłożenia siły wyróżniamy dźwignie jednostronną i dwustronną. Ze względu na stronę i długość ramienia wyróżniamy klasę I, II i III.
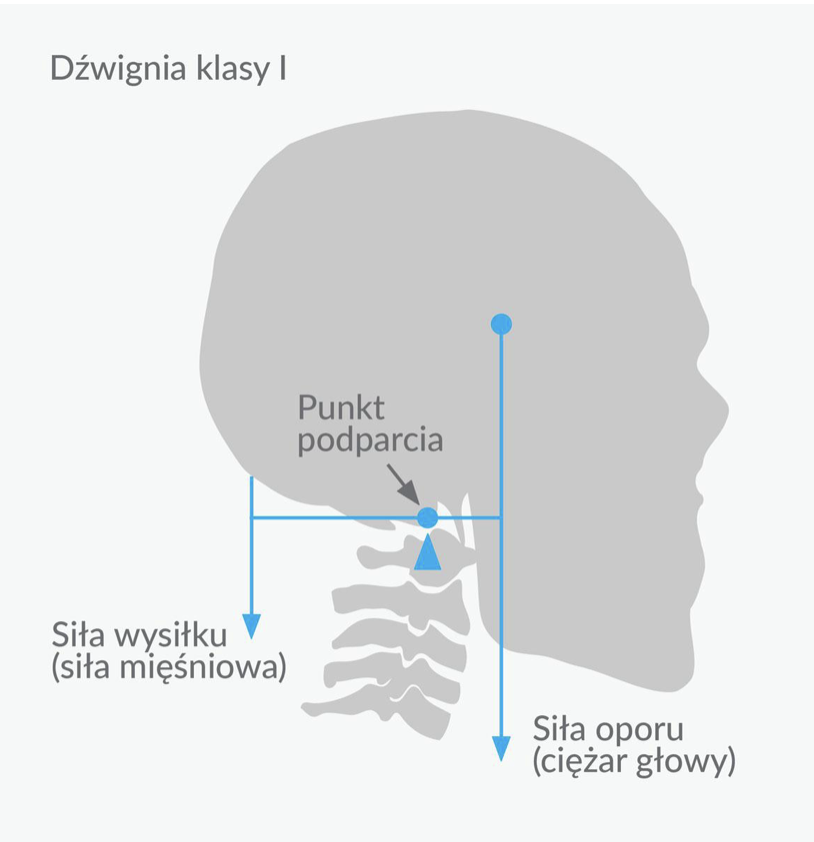
Dźwignia klasy I.
To dźwignia, w której punkty przyłożenia sił działających mięśni i oporu są po przeciwnych stronach punktu podparcia. Oczywiście przykłady dźwigni klasy pierwszej w ludzkim ciele istnieją. Para agonistów i antagonistów (mięśni) oddziałujących na siebie nawzajem jednocześnie po przeciwnych stronach tworzą dźwignię pierwszej klasy. Generalnie w większości przypadków, dźwignie pierwszej klasy w ludzkim ciele działają tak: dźwignia działa tak, aby zrównoważyć lub zmienić kierunek siły wysiłku. Przykładem tutaj mogą być mięśnie płatowate działające tak, aby równoważyć głowę (ciężar głowy) na stawie szczytowo-potylicznym.
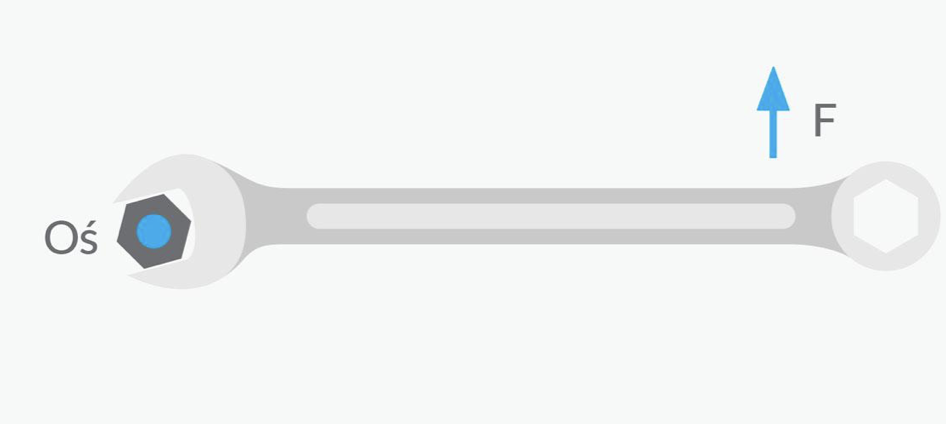
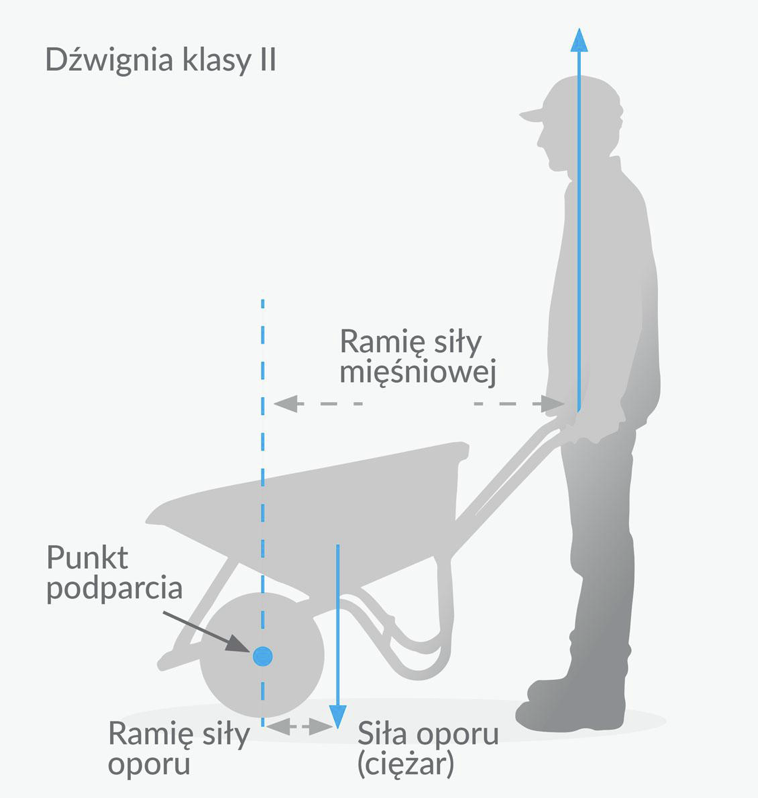
Dźwignia klasy II.
W dźwigni drugiej klasy, siła wysiłku i siła oporu działają po tej samej stronie od punktu podparcia. W tym przypadku, siła oporu (ciężar) działa między punktem podparcia, a siłą wysiłku. To znaczy, że ramię siły oporu jest mniejsze, niż ramię wysiłku.
Jednym z przykładów podczas codziennego życia może być praca wykonana za pomocą taczki. Używając taczki jako przykładu, siły mięśniowe mogą być wykorzystane w celu przeciwdziałania znaczących siłom oporu dostarczanych przez obciążenie w taczce. W ciele
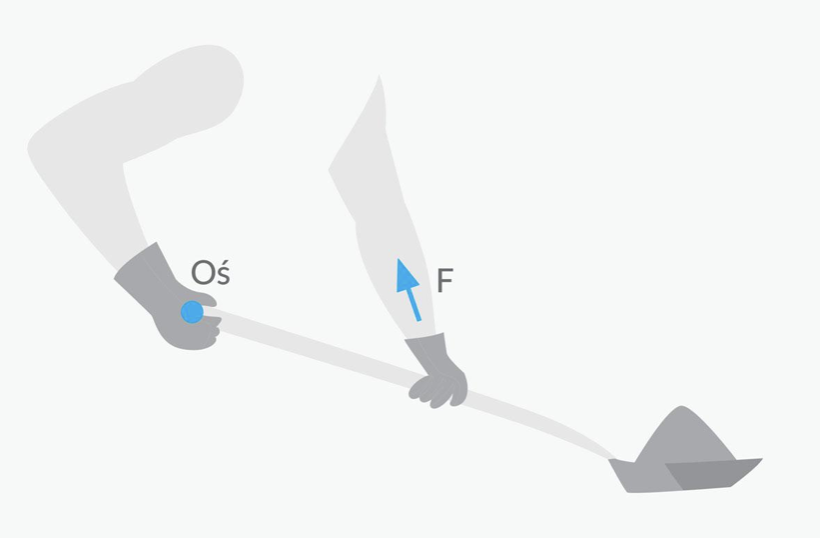
Dźwignia klasy III.
W dźwigni trzeciej klasy siła wysiłku i oporu są również po tej samej stronie punktu podparcia – podobnie jak w klasie drugiej. Jednakże, przy tym ułożeniu, siła wysiłku (mięśniowa) działa między punktem podparcia i linią akcji siły oporu (ciężaru).
W rezultacie, ramię siły wysiłku jest mniejsze, niż ramię siły oporu.
Przykładem takiej dźwigni może być z życia wzięte kopanie szpadlem. W tym przypadku, ręka najbliżej końca szpadla nakłada siłę wysiłkową.
Dlatego też, wydaje się, że potrzebna jest duża siła wysiłku, aby pokonać umiarkowaną siłę oporu.
W przypadku dźwigni trzeciej klasy, duża siła wysiłku jest nałożona, aby uzyskać przewagę zwiększonej szybkości ruchu. Bezpiecznie będzie wyciągnąć konkluzję, iż większa szybkość ruchu, na przykładzie dźwigni trzeciej klasy, wydaje się być podkreślona w układzie mięśniowo-szkieletowym z wyłączeniem faktu większej zdolności nałożenia siły wysiłku przez dźwignie klasy drugiej.

Stanowi to najbardziej wyróżniający się typ dźwigni w ludzkim ciele: praktycznie wszystkie stawy kończyn działają jako dźwignie klasy trzeciej.
Czy to wszystko z biomechaniki? Oj nie, jest tego zdecydowanie więcej, ale te podstawowe informacje wystarczą, aby wejść w świat mechaniki ruchu, wejść w świat analizy tego jakie siły na nas działają, jakie my siły wywieramy na nas samych oraz świat zewnętrzny.